NÁKLADNÍ VOZIDLA PRO PŘEPRAVU S VYSOKÝM VÝSLEDKEM

Parametr produktu
| MODEL XWS-1450 | POLOŽKY | JEDNOTKA | PARAMETRY |
| Výkonové parametry | Jmenovitá hmotnost nákladu (min. vzdálenost od předních kol) | Kg | 5000 |
| Vzdálenost od středu vidlice k předním kolům | mm | 2200 | |
| Max.zvedání závaží | Kg | 7500 | |
| Vzdálenost od zvedacího šroubu k předním kolům | mm | 1000 | |
| Max.výška zdvihu | mm | 13775 | |
| Max.přední prodloužení | mm | 11 000 | |
| Max.rychlost běhu | Km/h | 30 | |
| Max.schopnost lezení | ° | 25 | |
| Hmotnost stroje | Kg | 15 000 | |
| Pracovní zařízení | Teleskopické výložníky | Sekce | 4 |
| Prodlužte si čas | s | 12 | |
| Zkracující se čas | s | 14.5 | |
| Max.úhel zdvihu | ° | 65 | |
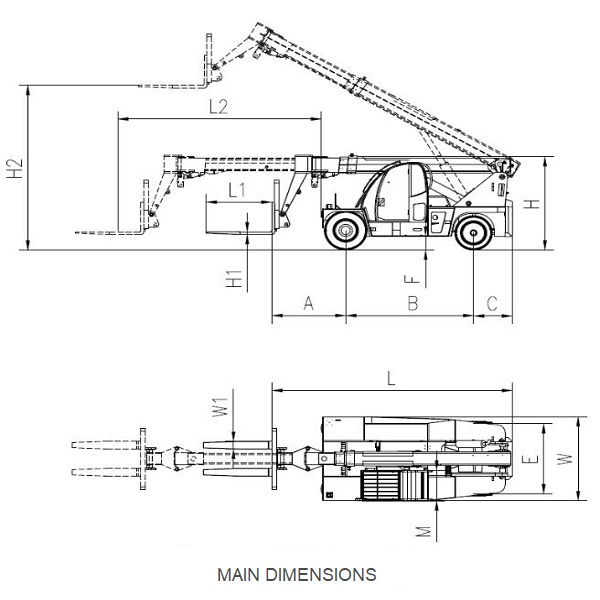
| Celková velikost | Délka (bez vidlic) | mm | 6900 |
| Šířka | mm | 2300 | |
| Výška | mm | 2350 | |
| Vzdálenost mezi hřídelemi | mm | 3500 | |
| Kola šlapou | mm | 1800 | |
| Min.světlá výška | mm | 375 | |
| Minimální poloměr otáčení (pohon dvou kol) | mm | 4850 | |
| Minimální poloměr otáčení (pohon čtyř kol) | mm | 4450 | |
| Standardní velikost vidlice | mm | 1200*150*50 | |
| Standardní konfigurace | Model motoru | - | LR6A3LU |
| Jmenovitý výkon | Kw | 117,6/2400 | |
| Řízení | - | Přední kola | |
| Turing | - | Zadní kola | |
| Typy pneumatik (přední/zadní) | - | 11:00–20 (4/2) |
Detaily produktu
Teleskopické manipulátory jsou schopny zvedat těžká břemena až do specifikací zdvihové kapacity a výšky jednotky, včetně paletizovaného a nepaletizovaného zboží, jsou-li vybaveny správným příslušenstvím.
Zatímco vysokozdvižné vozíky jsou ve svých pohybových schopnostech jednorozměrné, teleskopické nakladače se mohou pohybovat diagonálně, což jim umožňuje nabírat a přepravovat náklady, které by standardní vysokozdvižný vozík nebyl schopen zvednout.





Díky své zvýšené manévrovatelnosti jsou teleskopické nakladače schopny se snadno dostat do zvláštních úhlů a stísněných prostorů s jejich výsuvným ramenem, což z nich činí ideální řešení manipulace s materiálem pro stísněné prostory.
Stabilizátory, které lze vysunout z jednotky, poskytují extra stabilitu a bezpečnost při zvedání těžkých břemen.
Funkce pohonu všech čtyř kol teleskopických manipulátorů umožňují jednotkám provoz na silnici i mimo ni.
Jednotky jsou vybaveny velkými robustními pneumatikami, které jsou schopny podporovat zvedání a přepravu těžkých nákladů a zároveň umožňují snadné cestování po nerovném a nerovném terénu, se kterým se často setkáváte na staveništích, na farmách nebo zemědělských plochách a dokonce i na těžebních místech.
Jednotky mohou být také registrovány na pozemních komunikacích, což jim umožňuje provozovat na značených asfaltových cestách, takže mohou bezpečně a snadno přepravovat náklady na místa při vykládání z nákladních vozů nebo mezi pracovišti.
Schopnost MULTIFUNKČNÍHO TELESKOPICKÉHO NAKLADAČE hydraulicky zvedat a manipulovat s velkými a těžkými břemeny v okolí místa snižuje potřebu zaměstnanců provádět rozsáhlé ruční zdvihací úkoly.
To může výrazně snížit pravděpodobnost, že se zraní nebezpečným nebo opakovaným ručním zvedáním.
Aby byla zajištěna maximální bezpečnost, musí teleskopické manipulátory na místě obsluhovat pouze plně vyškolení a kvalifikovaní pracovníci.
Operátoři musí absolvovat správné školení a mít správné oprávnění k bezpečnému ovládání jednotky a být schopni rychle a bezpečně reagovat v případě nouze.
Je také důležité zajistit, aby teleskopický nakladač nebyl vytlačen nad výrobcem specifikovanou nosnost a výšku, jinak to značně zvyšuje riziko zranění, poškození produktu nebo zařízení nebo dokonce úmrtí na pracovišti.
Pro další použití a údržbářské práce nás prosím kontaktujte pro podrobnosti.
Několik kroků před použitím teleskopických manipulátorů.
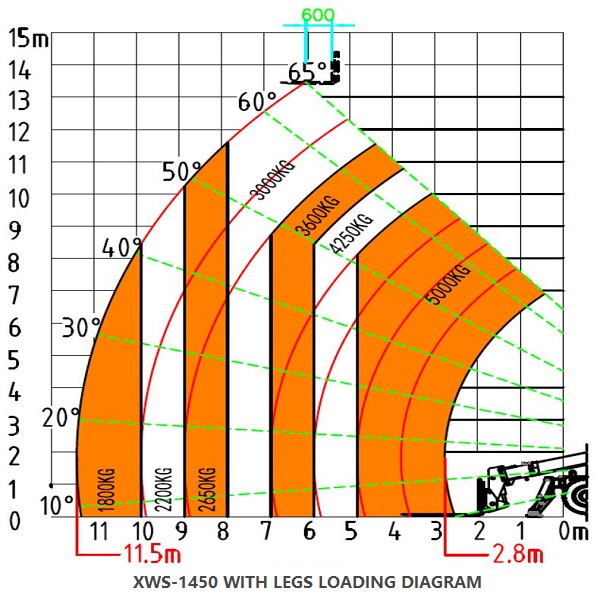
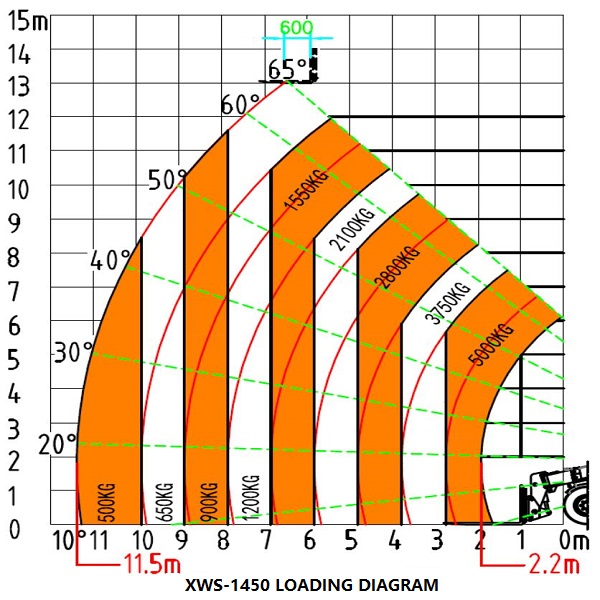
Krok 1.Podle vašeho úkolu, sklonu terénu, rychlosti větru, příslušenství vyberte vhodný model stroje.Podívejte se na parametry, nakládací diagramy a celkovou velikost stroje.Přetížení je zakázáno.
Krok 2. Nainstalujte nástavec na konec výložníku, ujistěte se, že všechny matice jsou pevně přišroubovány a olejové potrubí je dobře připojeno bez úniku.
Krok 3. Zkontrolujte všechny funkce, abyste se ujistili, že se všechny mohou pohybovat hladce bez abnormálních zvuků.
Krok 4. Další požadavek najdete v úvodu.





